探索智慧駕駛的安全邊界 陳奕廷教授研究團隊之情境式視覺風險辨識與感知技術
- Published on
- Author
- 魏彣芯
文/杜懿洵
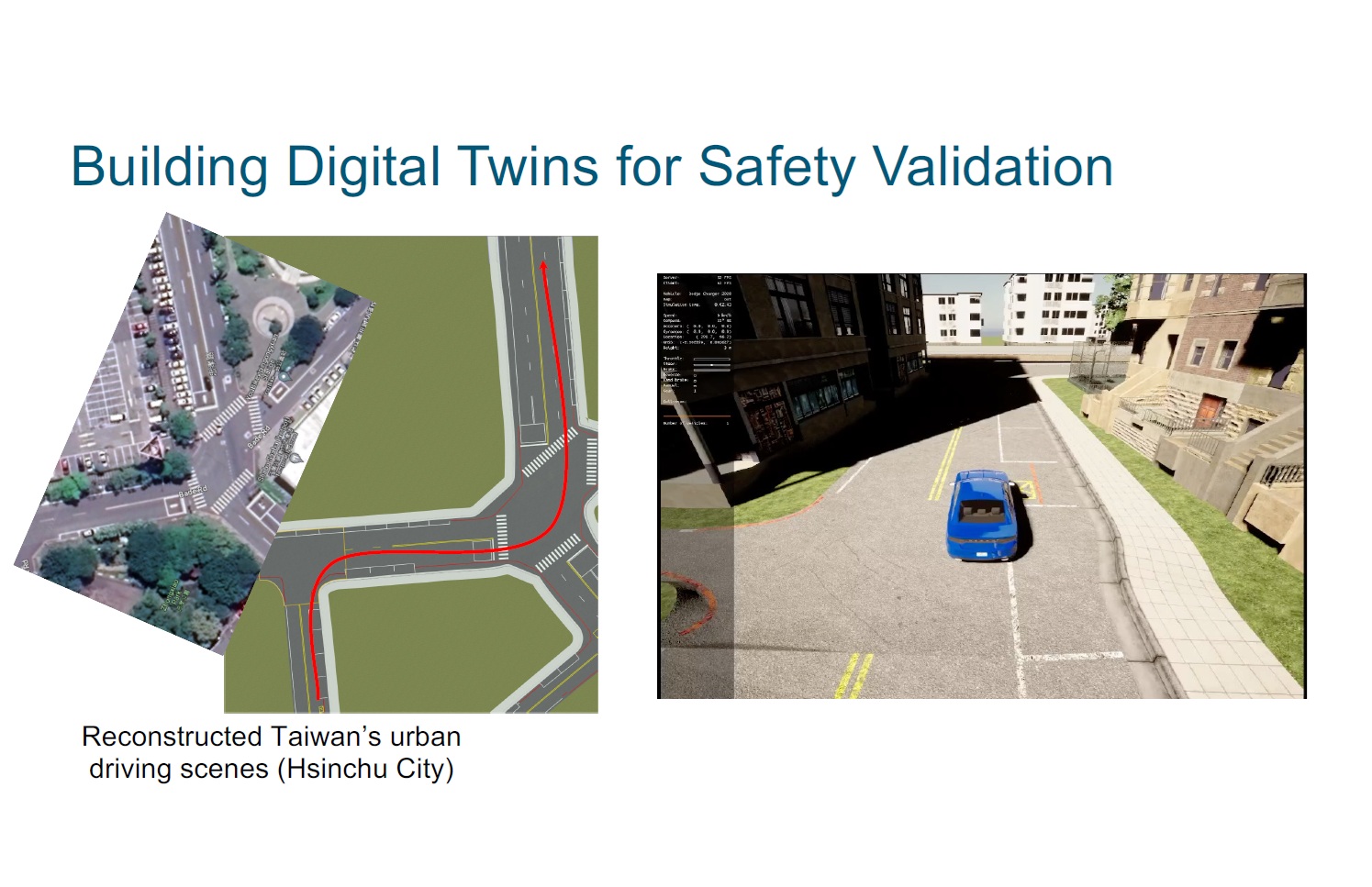
隨著智慧駕駛系統技術迅速發展,如何在多變且複雜的環境中確保系統能做出安全且合理的決策,已成為學界與產業界高度關注的核心議題。國立陽明交通大學資訊工程學系副教授陳奕廷長期專注於視覺風險物體辨識與其效能驗證的研究,並領導「人本智慧系統實驗室」,從人因視角出發,致力於發展具解釋性與實用性的創新架構,為智慧駕駛系統建立更加穩健的安全基石。
一、RiskBench: 情境式風險物體辨識驗證平台
過去針對視覺風險物體辨識的驗證方式多仰賴不同資料集,難以全面評估各種演算法的表現,且現有資料集多未依據實際道路情境進行情境化定義,限制了對方法效能與侷限的驗證。針對此挑戰,陳奕廷副教授團隊提出「RiskBench」,一套基於情境分類(Scenario Taxonomy)設計的全新風險物體辨識驗證平台,支援系統性測試與演算法評估。
RiskBench 將風險情境區分為四大類型:
- 互動型風險:需主動回應動態風險物體(如行人穿越馬路)。
- 碰撞型風險:存在實際或潛在的碰撞可能。
- 障礙型風險:例如施工區或靜態障礙物阻擋行車路徑。
- 非互動型情境:一般正常駕駛環境,無明顯風險。
為全面評估辨識演算法之效能,RiskBench設計三項關鍵評估指標:
- 風險定位能力:是否能準確識別風險物體。
- 風險預測能力:能否及早發現潛在風險。
- 決策影響程度:該風險是否應影響駕駛決策。
此項研究成果已於國際頂尖機器人會議 International Conference on Robotics and Automation (ICRA) 2024 發表,並同步開放資料與工具,為全球學術與產業社群提供標準化的測試平台,促進風險辨識研究之發展與比較。
二、基於勢場表徵之視覺風險物體識別
針對以行為改變為基礎的風險物體識別演算法,目前存在兩大挑戰:其一,現有方法對場景語意與道路使用者的建模能力有限,難以有效理解複雜場景結構;其二,演算法的運算效率仍難以支援實時應用,限制其在實際場域的部署。為解決上述問題,陳奕廷副教授團隊提出全新風險識別架構——PF-BCP(Potential Field as Scene Affordance for Behavior Change-Based Visual Risk Object Identification)。
使架構的核心概念在於以勢場(Potential Field)建模場景可供性(Scene Affordance),針對場景中各物體(如行人、車輛),依其空間位置與語意標籤建立相對應的「吸引力」與「排斥力」,進而推估其對自車行進策略的潛在影響。系統運作流程如下:首先預測駕駛當下的行進目標,接著模擬「移除特定物體」後是否導致駕駛策略改變。若系統原判定需「停車」,但在移除某物體後轉為「前進」,則該物體即被視為真正影響決策的風險來源。此外,陳奕廷教授團隊採用鳥瞰圖(Bird’s-Eye View)表徵作為勢場建模基礎,能有效支援勢場在空間上的平行化計算,顯著提升整體運算效率,使此架構具備即時應用的潛力。此研究成果已發表於 International Conference on Robotics and Automation (ICRA) 2025,並同步開放資料與工具,供國際社群使用與開發。
三、應用高斯潑濺法於鳥瞰圖語意分割的不確定性建模
將攝影機影像轉換為鳥瞰圖表徵,是智慧駕駛感知系統中的一大挑戰。現有如 Lift-Splat-Shoot(LSS)方法,藉由預測深度資訊進行轉換,然而該方法在深度預測準確度與運算效率上皆存在瓶頸,限制其於實務應用中的可行性。
為突破此限制,陳奕廷教授團隊提出新一代 BEV 感知框架 GaussianLSS(Gaussian Splatting for BEV Perception),不再對每個像素進行單點深度估算,而是為每個像素建立高斯分布,導入「不確定性建模」的概念,使系統在進行語意分割與空間建模時能兼顧準確性與穩健性。此成果已發表於國際頂尖電腦視覺會議 Computer Vision and Pattern Recognition (CVPR) 2025,並已公開相關資料與工具,進一步推動智慧駕駛感知技術的研究與實用化。
結語:邁向更安全且可解釋的智慧駕駛系統
從風險辨識、資料集建構,到深度感知建模,陳奕廷教授與其所領導的 人本智慧系統實驗室團隊深入聚焦於智慧駕駛系統安全的關鍵挑戰。他們所倡導的「情境導向」與「可解釋性」設計理念,不僅大幅提升演算法的實用性與穩定性,更強化智慧駕駛系統於實際道路情境中的可預測性與信賴度。
展望未來,陳教授團隊將持續推動開放資料、標準化測試平台與跨校跨國合作,致力於建構一個安全、透明且值得信賴的智慧交通生態系統。他們的研究成果不僅為台灣智慧駕駛技術注入關鍵動能,也正積極與國際接軌,為全球智慧交通的永續發展貢獻堅實力量。